Ford a annoncé récemment, avoir triplé sa flotte de véhicules d’essai hybrides 100% autonomes, ce qui en fait la plus grande flotte du genre dans l’industrie automobile. Le constructeur automobile utilisera une nouvelle génération de capteurs de pointe, alors que la société accélère ses plans de développement des véhicules autonomes.

En 2016, Ford ajoutera 20 véhicules hybrides autonomes supplémentaires, ce qui portera sa flotte de véhicules autonome à environ 30 véhicules testés sur les routes de Californie, d’Arizona et du Michigan.
S’appuyant sur une décennie de recherches menées par Ford sur les véhicules autonomes, ce développement est un élément clé de Ford Smart Mobility – la stratégie qui permet de hisser Ford à un niveau supérieur en termes de connectivité, de mobilité, de véhicules autonomes, d’expérience client, de données et d’analyses.
Les nouveaux véhicules se trouvent sur la plate-forme de développement des véhicules autonomes de troisième génération de Ford, construits en utilisant des berlines hybrides Fusion, similaires à la plate-forme de deuxième génération.
Ford a récemment annoncé que ses véhicules 100% autonomes sillonneront les routes de Californie cette année. La société teste déjà des véhicules autonomes sur des circuits d’essai et des voies publiques dans le Michigan. Ford a également été le premier constructeur à tester un véhicule entièrement autonome au MCity – un environnement urbain simulé de 13 hectares à l’Université du Michigan.
Progrès en termes de détection, logiciels et matériels
Ford utilise aujourd’hui les nouveaux capteurs LiDAR de Velodyne – nommés Solid-State Hybrid (SH) Ultra PUCK Auto en raison de leur taille et de leur forme – sur sa plate-forme de véhicules autonomes de troisième génération.
Le détecteur SH Ultra PUCK Auto possède une portée de 200 mètres, ce qui en fait le premier détecteur auto-spécifique hybride LiDAR Solid-State hybride capable de gérer différents scénarios de conduite. L’Ultra Puck accélérera le développement et la validation du logiciel “conducteur virtuel” de Ford qui sert de cerveau pour la prise de décision dans la direction des systèmes de véhicules.
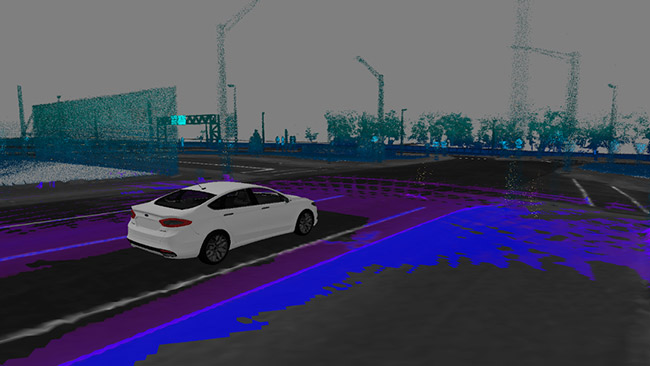
Le champ de vision et le design élégant et léger du SH Ultra PUCK Auto en font un détecteur optimal pour être intégré dans un véhicule autonome. Sa conception montre que Ford peut réduire la quantité de détecteurs LiDAR, en la faisant passer de quatre à deux, sur la troisième génération de véhicules hybrides autonomes et recueillir les mêmes datas qu’auparavant.
Les matériaux du véhicule, qui interagissent en permanence avec le conducteur virtuel, sont eux aussi importants.
Les berlines Fusion hybrides autonomes de troisième génération auront des fonctions redondantes et dupliquent le câblage pour de nombreux systèmes, y compris l’accélérateur, la direction et les freins. Ces redondances vont agir comme des sauvegardes, si nécessaire.
Même le groupe motopropulseur hybride électrique de la berline peut être considéré comme un système redondant, le véhicule ayant toujours une source d’alimentation si le moteur électrique à batterie ou le moteur à essence s’éteint.
L’aventure autonome de Ford
Ford utilise les détecteurs LiDAR de Velodyne depuis une dizaine d’années et a commencé avec la DARPA (Defense Advanced Research Projects Agency), défis de véhicules autonomes.
A cette époque, le P-DG et fondateur de Velodyne, David Hall, a consulté Jim McBride sur la technologie LiDAR et la façon dont elle pourrait être utilisée pour la visualisation 3D. Au cours de la même année, Hall a inventé le SH LiDAR, consolidant le système de détection de 64 lasers en une pièce élégante et en le tournant pour obtenir une vision à 360 degrés.
Ford a commencé à utiliser le premier détecteur LIDAR de Velodyne, une innovation qui a considérablement changé le paysage des véhicules autonomes. LiDAR émet de courtes impulsions de lumière laser pour scanner l’environnement, plusieurs millions de fois par seconde, et déterminer avec précision les distances entre les objets. Cela permet au véhicule de produire en temps réel une image 3D haute définition de tout ce qui l’entoure.
La plate-forme des véhicules autonomes de première génération de Ford a été construite en utilisant un modèle Ford F-250 Super Duty à la participation dans les défis DARPA en 2005 et 2007. En 2013, Ford a présenté sa plate-forme de véhicules autonomes de deuxième génération en utilisant une berline Fusion hybride.
Ford a été l’une des six équipes à participer à la DARPA Desert Classic et les défis urbains finaux, appuyés par quatre ingénieurs qui sont encore présents au sein de l’équipe de développement des véhicules autonomes de l’entreprise, aujourd’hui.
La plate-forme des véhicules autonomes de première génération aide Ford à comprendre comment une conduite 100% autonome serait techniquement possible dans un proche avenir, et ce qu’il faut faire pour atteindre ces objectifs au travers d’une recherche ambitieuse.
Tekiano avec communiqué

Plus : Matos Tek TopNews